

Режим Изображения (Image Mode)
Эффект шумоподавления позволяет совершать манипуляции с изображением/фото, используя цветовые системы RGB, HSV и LAB.
Фильтруемые значения (Value Filtering)
Например, когда Вы выбираете режим RGB, обычный усредняющий фильтр и фильтруемые значения: красный, синий - это означает, что значение красного или синего в каждом пикселе значения красного и синего будут усреднены в соответствии с красными и синими компонентами соседних пикселей.
Ширина и высота апертуры (Apperture Width & Height)
Большинство фильтров работают по следующему принципу: выбирается небольшое окно (обычно 3x3, 5x5 пикселей), называемой апертурой. Это окно "пробегает" нашу картинку с шагом в 1 пиксель, начиная от верхнего левого, и заканчивая нижним правым углом. На каждой итерации как правило обрабатывается средний пиксель апертуры в соответствии со значениями всех пикселей этого окна (которые называются окрестностью этого пикселя). Увеличение размера апертуры, как правило, приводит не только к более эффективному удалению шумов, но и к более сильному размыванию границы.
Простые усредняющие фильтры (Simple Normal Filters)
Основаны на вычислении среднего арифметического, среднего геометрического и т.п. значений апертуры.
Статические Фильтры (Order Statistic Filters)
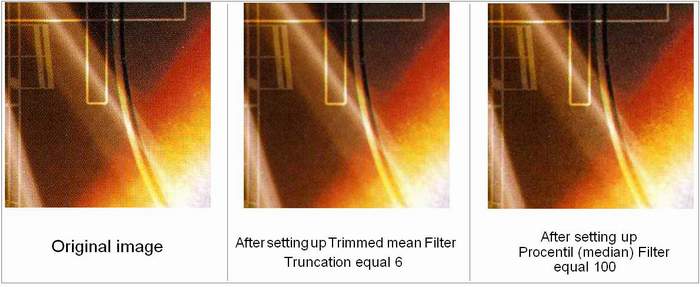
Процентный медианный фильтр (Procentil median Filter).
является одним из самых распространенных фильтров. Его действие заключается в замене значения пикселей на медиану его окрестности. Применение этого фильтра дает отличные результаты для изображений, искаженных импульсным шумом и другими видами случайных шумов. Относительно слабо (в отличие от усредняющих фильтров) размывает изображение.
В свою очередь медианный фильтр является частным случаем процентного фильтра(в случае с медианой процентный фильтр равен 50). Другими частными случаями являются фильтры максимума (процентный фильтр = 100) и минимума (процентный фильтр = 0). Первый - эффективен для выделения светлых точек и уменьшения черного шума, второй - наоборот, для выделения темных точек и уменьшения белого шума.
Пример Медианного фильтра:

Фильтр серединной точки (Midpoint Filter)
Фильтр серединной точки является усреднением значений максимума и минимума и наиболее подходит для таких случайно распределенных шумов, как Гаусса или равномерный.
Фильтр усеченного среднего (Trimmed Mean Filter)
Фильтр усеченного среднего является аналогом медианного фильтра, но не рассматривает n/2 точек наибольшей яркости и n/2 точек наименьшей яркости.
Адаптивные фильтры(Adaptive Filters)
Особенностью адаптивных фильтров является то, что они не задаются определенной формулой, а меняют свои свойства в зависимости от места картинки, в котором находится апертура.
Адаптивные локальные фильтры (Adaptive Local Filter)
Адаптивный локальный фильтр является по сути адаптивным усредняющим фильтром, но в отличии от простых усредняющих фильтров, дает значительно меньшее размытие. Может применяться для ликвидации шума Гаусса.
Адаптивный медианный фильтр (Adaptive Median Filter)
Адаптивный медианный фильтр “старается сохранить” значения пикселей в областях картинки, которые искажены не импульсным шумом за счет того, что может изменять размер своей апертуры в зависимости от окрестности пикселя. В целом также дает меньшее размытие и большую точность.
Отражающие фильтры (Reject Filters)
Отражающие фильтры (в т.ч. и Узкополосный отражающий фильтр) работают в частотной области. Общая схема действия такая: по изображению вычисляется его Фурье-спектр. Затем с Фурье-спектром производят определенные преобразования, которые либо ослабляют, либо усиливают значения определенных частот. После этого над Фурье-спектром производят обратное преобразование Фурье, и получается отфильтрованная картинка. Все фильтры в частотной области не зависят от размеров апертуры. Собственно, отражающий Гауссов фильтрм (Reject Gauss Filter) и фильтр Баттерворта (Reject Butterworth Filter) удаляют или ослабляют частоты в кольцевой области вокруг начала координат Фурье. Параметр W отвечает за ширину кольца, а D0 за радиус окружности, проходящий через середину кольца. Фильтр может применяться для удаления периодических шумов и, в частности, эффективно решает проблему шумов, которые возникают при сканировании глянцевой поверхности, особенно при не очень высоком разрешении. Ценность такого шумоподавления в том, что размытие картинки практически отсутствует.
Узкополосные отражающие фильтры (Narrow-band Reject Filters) бывают эффективны, если известно направление шумов. Например, если шум представляет из себя прерывистые параллельные линии. U0, V0 – координаты такой точки в верхней левой четверти картинки, для которой, если взять симметричную ей, то она окажется по направлению шума.
Винеровские фильтры (Wiener Filters) могут быть в первую очередь интересны тем, кто изучает фильтрацию. Винеровские фильтры предназначены для деблюра изображения. Особенностью винеровской фильтрации является то, что она может производиться по разным формулам. В программе реализована фильтрация по двум формулам: формуле турбулентности и формуле движения. Формула турблентности более-менее справляется с задачей усиления резкости и выделения контуров обычного размытого изображения, по крайней мере глаз оно перестает "резать".
Пример Винеровского фильтра с параметрами: De-blur=0.0025, фактор шума=0.0001:
